visitas
1395
votos
-1
votos++Votar positivamente esta entrada :)
+54
votos--Votar negativamente esta entrada :(
-55
Robots, Kinect y el problema SLAM

Dado que una cámara estereográfica para proyectos de investigación puede costar sobre unos 3.000 € y Kinect siendo mucho más barato consigue hacer lo mismo, lo lógico era que empezaran a surgir todo tipo de proyectos de investigación que lo aprovechasen para hacer robots. Además, también sería un buen dispositivo para que los ciegos pudieran recibir señales acústicas de su entorno. A continuación explico cómo son algunos de los robots que están surgiendo:
El primero de ellos esta montado sobre una especie de Robot aspirador. Lo ha realizado un estudiante de doctorado del MIT, llamado Philipp Robbel. El robot es capaz de reconocer el entorno, ubicarse en él, identificar humanos y responder a sus gestos.

Este robot es interesante explicarlo en profundidad. Para crear un mapa 3D de su entorno envía, por WiFi, la información recogida por Kinect a un ordenador que hace de cerebro del robot. Éste ejecuta un algoritmo llamado SLAM (Simultaneous Localization And Mapping) que crea un mapa del entorno al mismo tiempo que hace un seguimiento de la posición actual del robot, con el fin de que el robot pueda saber dónde está, cómo es el mundo y en consecuencia a dónde dirigirse. Es un problema complejo, por un lado no podemos trazar la posición del robot si no conocemos el mapa, y por otro no podemos recrear el mapa si no sabemos desde qué posición está captando imágenes del robot. Los errores acumulados a cada paso que da el robot hacen que sea más difícil estimar su posición en el espacio y calcular el mapa sin distorsiones, siendo este uno de los problemas que quedan aún por resolver en inteligencia artificial.
El siguiente robot es un cuadricóptero capaz de volar siguiendo sólo unas marcas sin chocarse con nada.

A continuación, un robot de cuatro ruedas que puede desplazarse bastante rápido sin chocarse:
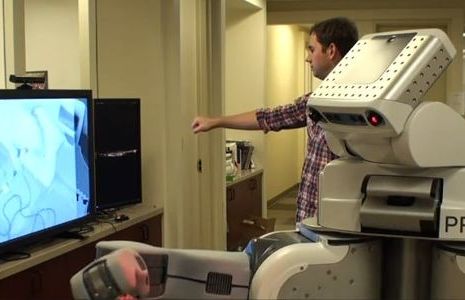
Por último, un robot que no usa Kinect directamente. En este caso es el humano el que usa Kinect como interfaz para controlar el robot, una opción muy interesante para controlar robots a distancia en situaciones peligrosas, aunque todavía el proyecto no está muy avanzado.
Entradas relacionadas: